1. Introduction
Ray tracing is the process of determining the ray intersection (or set of intersections) with objects along the ray’s direction, starting from some point of origin.
2. Motivation for Double-Down
Ray tracing commonly used in visualization and rendering to produce high-quality images of objects, scenes and/or data. This process is relatively costly compared to other visualization techniques, however. As a result, significant research and development has gone into optimizing ray tracing algorithms and data structures.
Ray tracing is often necessary in scientific applications as well, but constraints on precision and speed differ when considering distances to intersection in simulation versus visualization.
For example, ray tracing is used in Monte Carlo simulations of radiation to track individual particles as they move from object to object in the model. As described in mcrt_flowchart, both a distance to collision (treated as if the current medium is infinitely large) and distance to nearest surface crossing are considered.
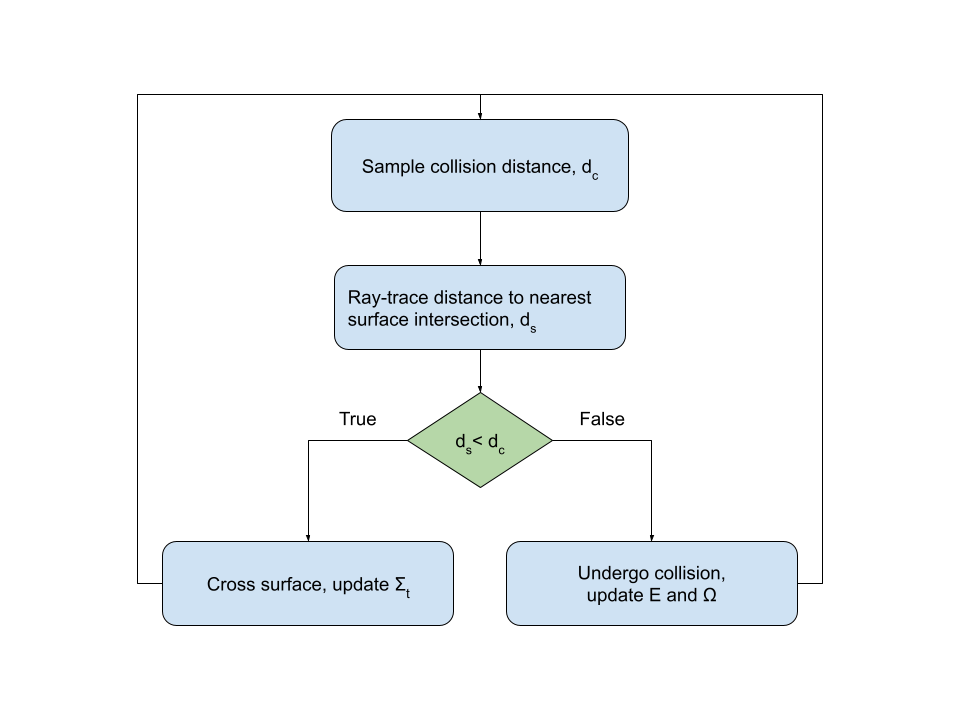
If the distance to the collision site is smaller than the distance to the surface crossing, the particle undergoes a collision and it’s properties are updated accordingly. If the distance to the nearest surface along the particle’s trajectory is smaller than the collision distance, the particle will cross the surface and enter the region on the other side.
Computation of the nearest surface crossing requires a ray to be traced to the boundary of the current region. While these models have historically been represented using Constructive Solid Geometry (CSG), more complex models rely on CAD-based tessellations of analytic surfaces. For these tesellated surfaces composed of triangle primitives, ray tracing operations in single precision with particle properties represented in double precision (location and direction) cause problems in tracking algorithms resulting in a decoupling of the particle’s logical position (what region it resides in) from it’s numerical position (see shriwise_2015_ans). These issues can cause a loss of statistics that bias results of the simulation.
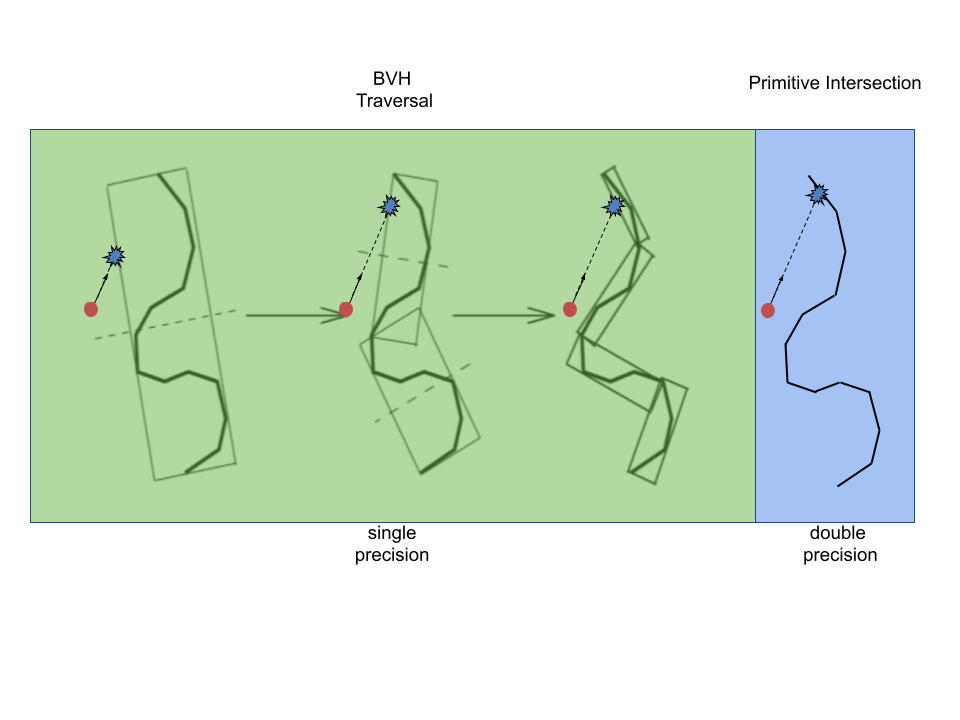
To address these issues, the process of BVH traversal is separated from primitive intersection at the leaf nodes of the hierarchy. Given that the majority of computational operations in a ray fire are spent traversing the BVH, performing these operations in single precision has a high impact on performance. When candidate primitives are reached at the leaf nodes of the BVH, primitive intersection routines can still be performed in double precision (as depicted in mixed_precision_traversal). Thus the ray tracing kernel can greatly benefit from performing most operations in single precision while returning the same numerical result from the ray fire query in double precision.
The metric used here for a robust approach is that the nearest intersected primitive and distance returned from the ray fire is the same using the mixed precision approach as in the double precision case. This is possible so long as the set of BVH nodes with positive ray-box intersections in single precision contains the set of nodes with positive intersection checks in double precision. To ensure that this is true, single precision bounding boxes are extended by some value \(\epsilon\). The artificial expansion of these boxes is kept to a minimum, only set large enough to maintain robustness in the kernel, to avoid increasing the overlap of sibling bounding boxes and superfluous intersection checks — a known issue that can degrade the performance of BVH traversal. Verification of this approach can be found in shriwise_2018_ans.